×
模态框(Modal)标题
在这里添加一些文本
关闭
关闭
提交更改
取消
确定并提交
×
模态框(Modal)标题
×
检索
E-mail
RSS
作者投稿和查稿
主编审稿
专家审稿
编委审稿
远程编辑
Toggle navigation
计算机工程
首页
期刊信息
杂志社
期刊介绍
收录及获奖情况
期刊订阅
在线期刊
iPad移动阅读平台
最新录用
当期目次
过刊浏览
阅读排行
全文下载排行
引用排行
Email Alert
RSS
作者中心
投稿指南
常见问题
编委会
主编
编委会
政策与道德声明
开放获取声明
出版道德声明
学术不端认定与处理
同行评审
下载中心
联系我们
English
作者投稿和查稿
主编审稿
专家审稿
编委审稿
远程编辑
×
文章快速检索
图/表 详细信息
YGL-SLAM: 动态场景下基于点和线的语义SLAM系统
戴康佳, 徐慧英, 朱信忠, 李悉钰, 黄晓, 陈国强, 张志雄
计算机工程, 2025, 51(
3
): 95-104. DOI:
10.19678/j.issn.1000-3428.0068950
表1
YGL-SLAM采用不同方法在TUM数据集上绝对轨迹误差对比
本文的其它图/表
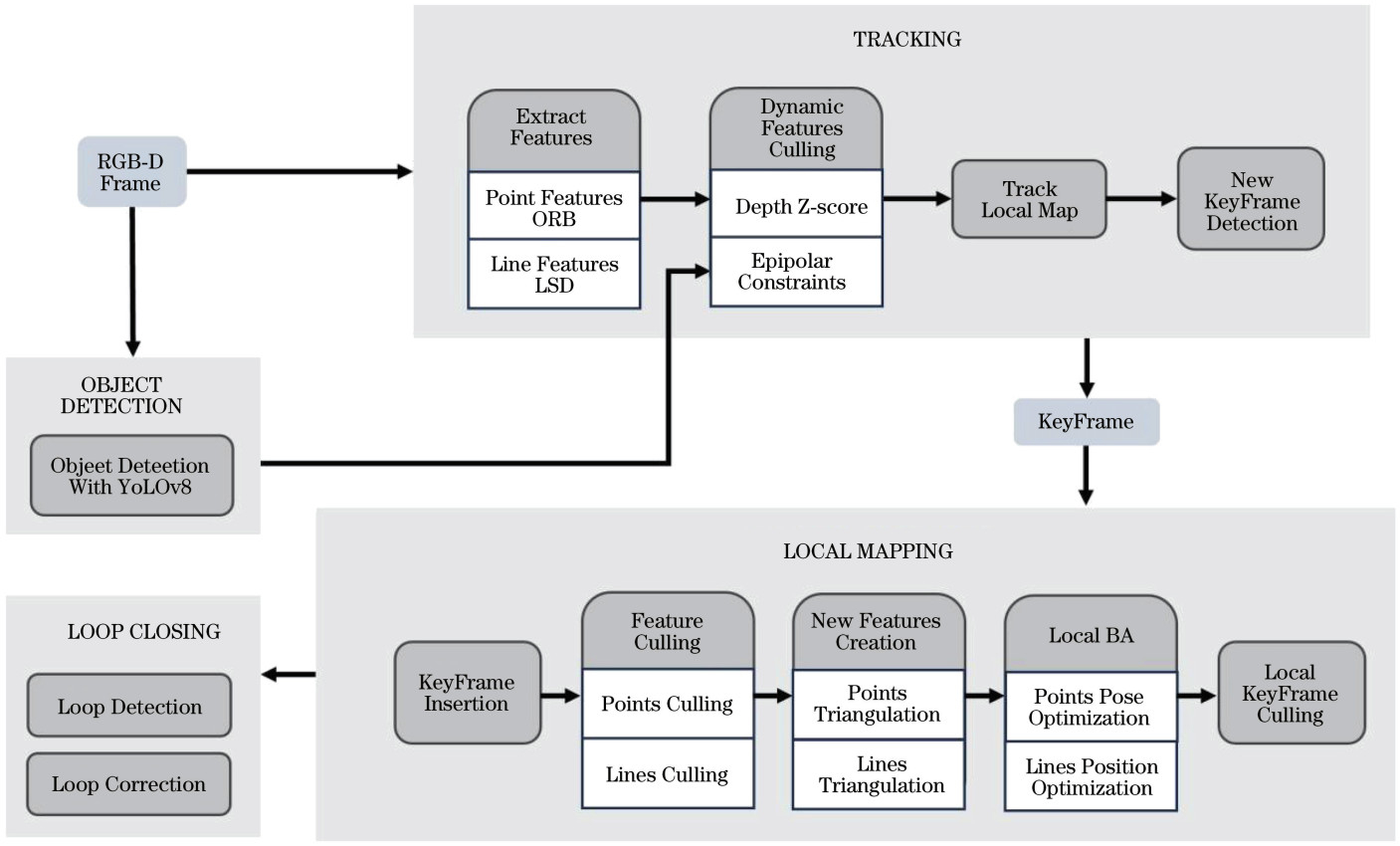
图1
YGL-SLAM系统框架
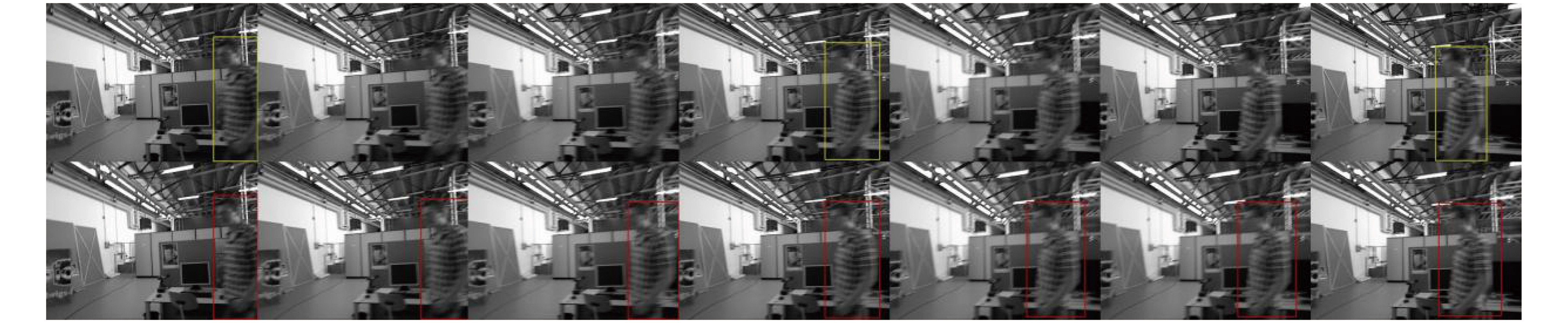
图2
检测补偿结果
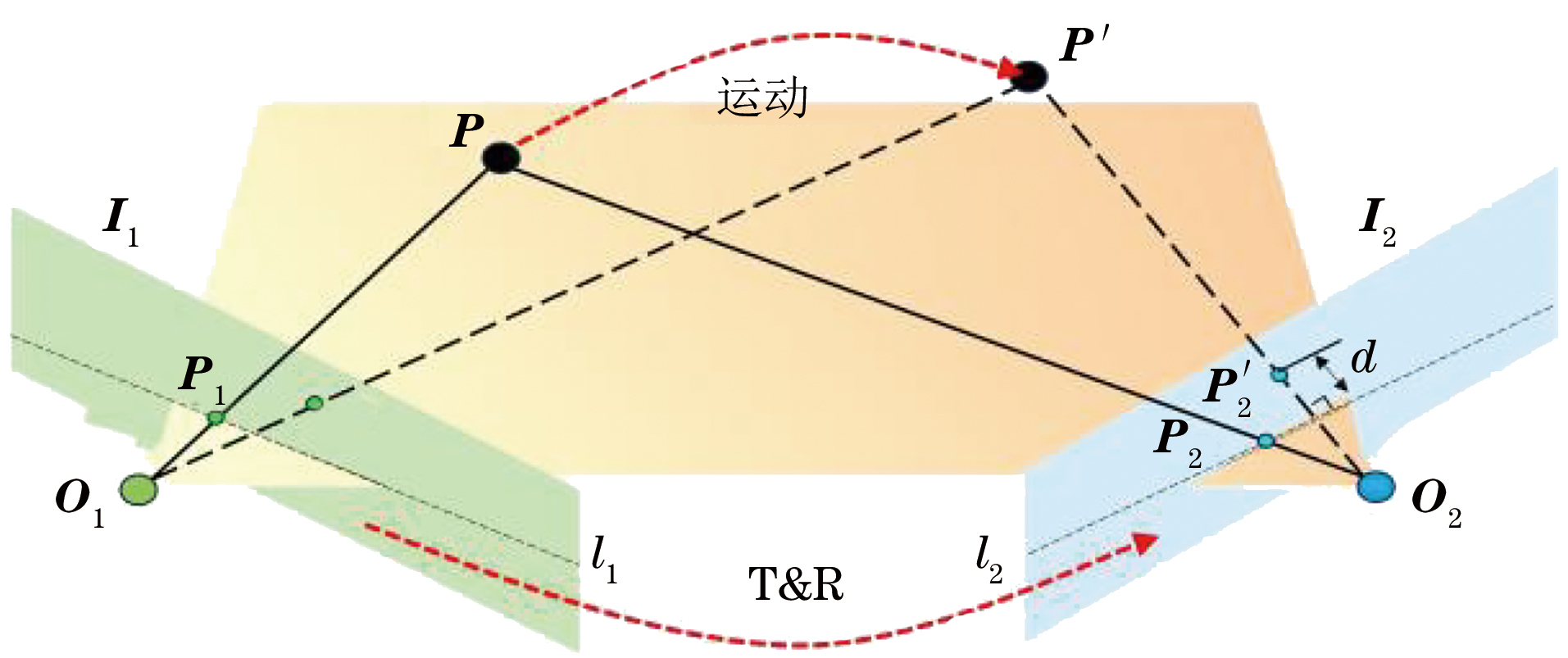
图3
对极几何约束示意图
图4
动态特征剔除效果
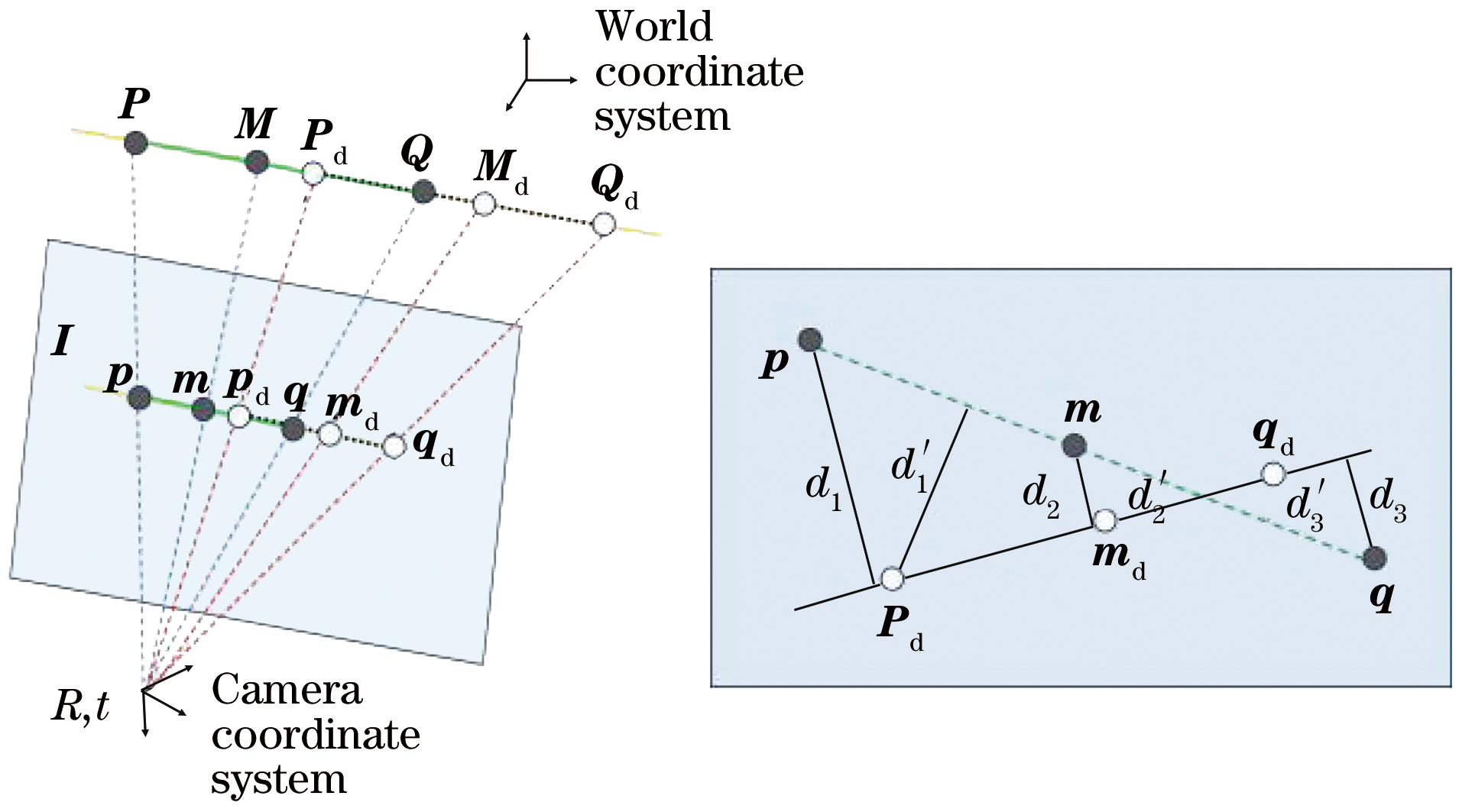
图5
线重投影误差
表2
YGL-SLAM在TUM数据集上与其他SLAM算法轨迹误差对比
表3
YGL-SLAM采用不同方法在Bonn数据集上绝对轨迹误差对比
表4
在Bonn数据集上YGL-SLAM与其他SLAM算法轨迹误差对比
图6
ORB-SLAM2、DynaSLAM、YGL-SLAM算法的绝对估计位姿优化
表5
动态SLAM平均每帧耗时分析
表6
YGL-SLAM各个阶段的时间分析