×
模态框(Modal)标题
在这里添加一些文本
关闭
关闭
提交更改
取消
确定并提交
×
模态框(Modal)标题
×
检索
E-mail
RSS
作者投稿和查稿
主编审稿
专家审稿
编委审稿
远程编辑
Toggle navigation
计算机工程
首页
期刊信息
杂志社
期刊介绍
收录及获奖情况
期刊订阅
在线期刊
iPad移动阅读平台
最新录用
当期目次
过刊浏览
阅读排行
全文下载排行
引用排行
Email Alert
RSS
作者中心
投稿指南
常见问题
编委会
主编
编委会
政策与道德声明
开放获取声明
出版道德声明
学术不端认定与处理
同行评审
下载中心
联系我们
English
作者投稿和查稿
主编审稿
专家审稿
编委审稿
远程编辑
×
文章快速检索
图/表 详细信息
嵌入房间类别和边界约束的目标驱动导航算法
罗锦源, 谷雨
计算机工程, 2025, 51(
4
): 85-96. DOI:
10.19678/j.issn.1000-3428.0069313
图10
房间分类结果
本文的其它图/表
图1
目标驱动的导航任务描述
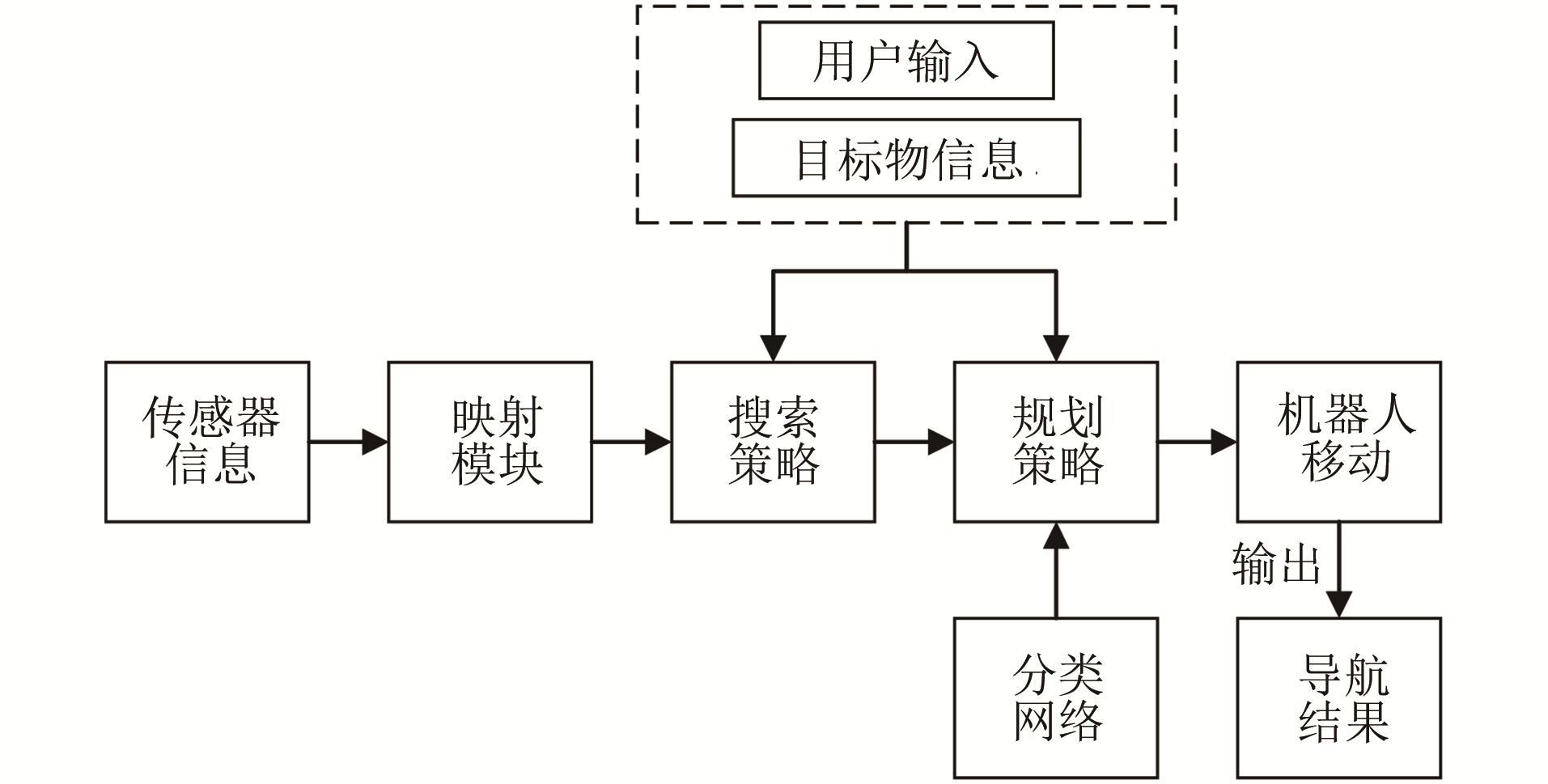
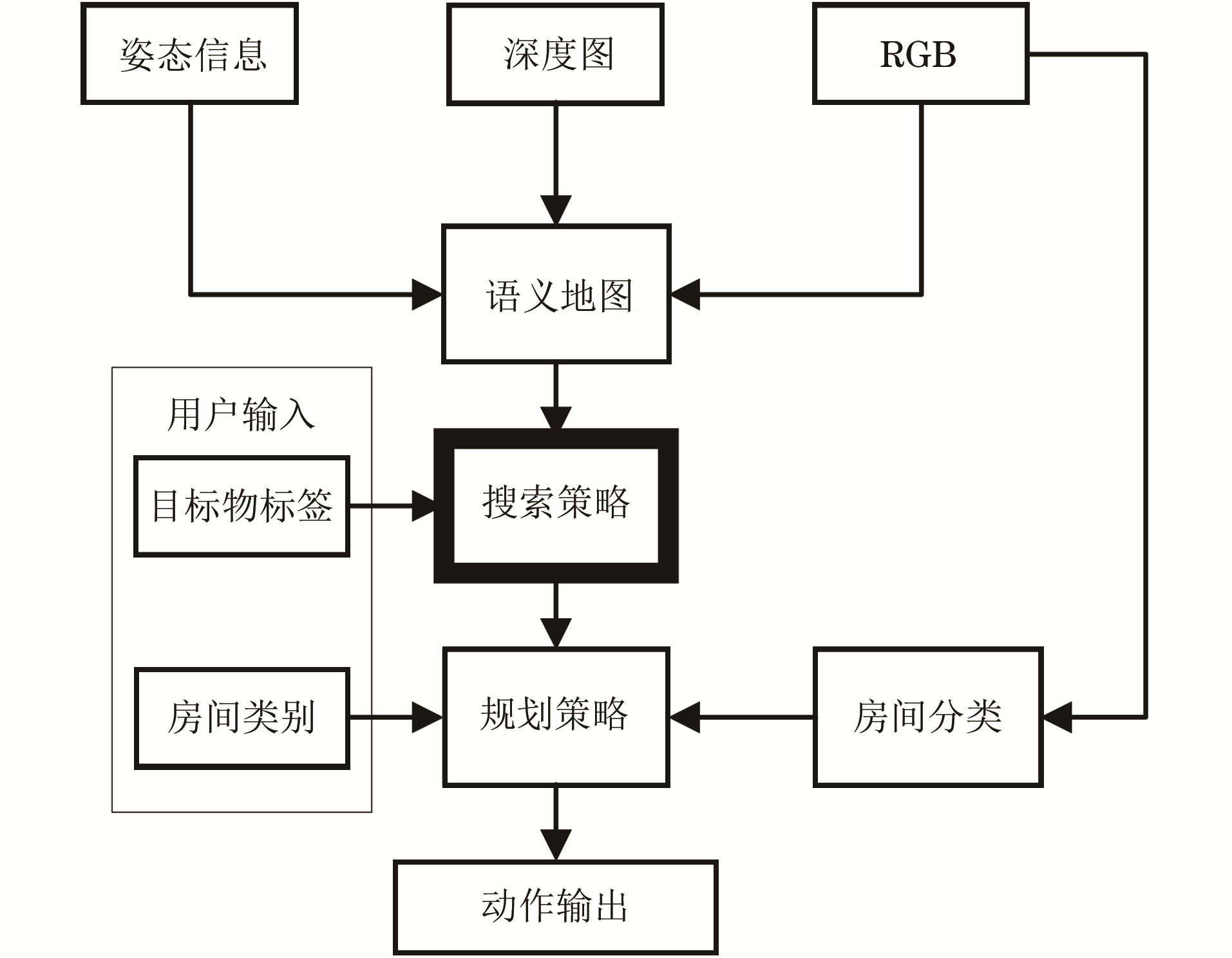
图2
导航算法流程
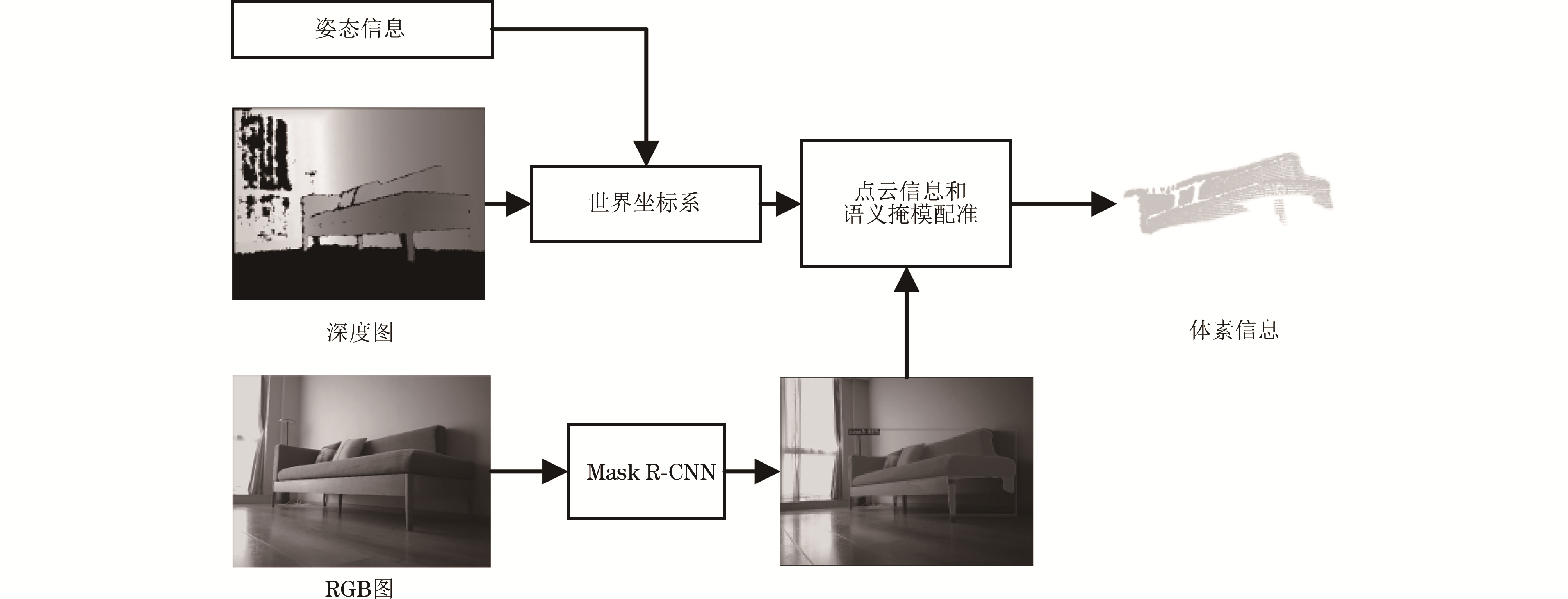
图3
语义映射
图4
搜索策略网络结构
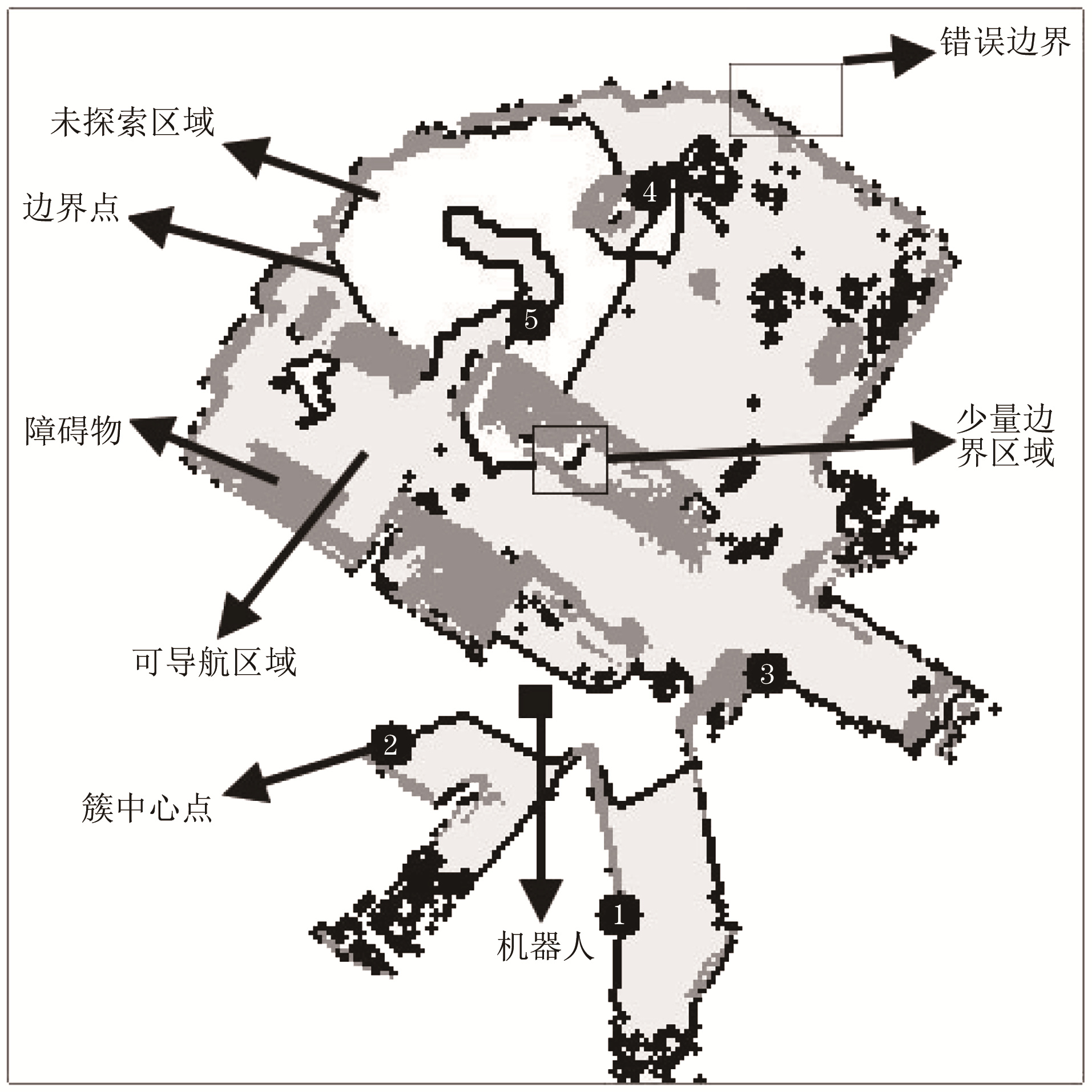
图5
地图数据分析
图6
全局目标选择
图7
多余奖励示意图
图8
运动控制策略
表1
搜索策略的参数设置
图9
麦克纳姆轮移动机器人
表2
不同模型在房间分类任务上的性能比较
表3
奖励函数参数设置
表4
传统目标驱动导航任务对比实验结果
图11
引入边界点约束的导航轨迹
图12
无边界点约束的导航轨迹
表5
附加房间约束导航任务对比实验结果
表6
边界点约束消融实验结果
图13
实验环境
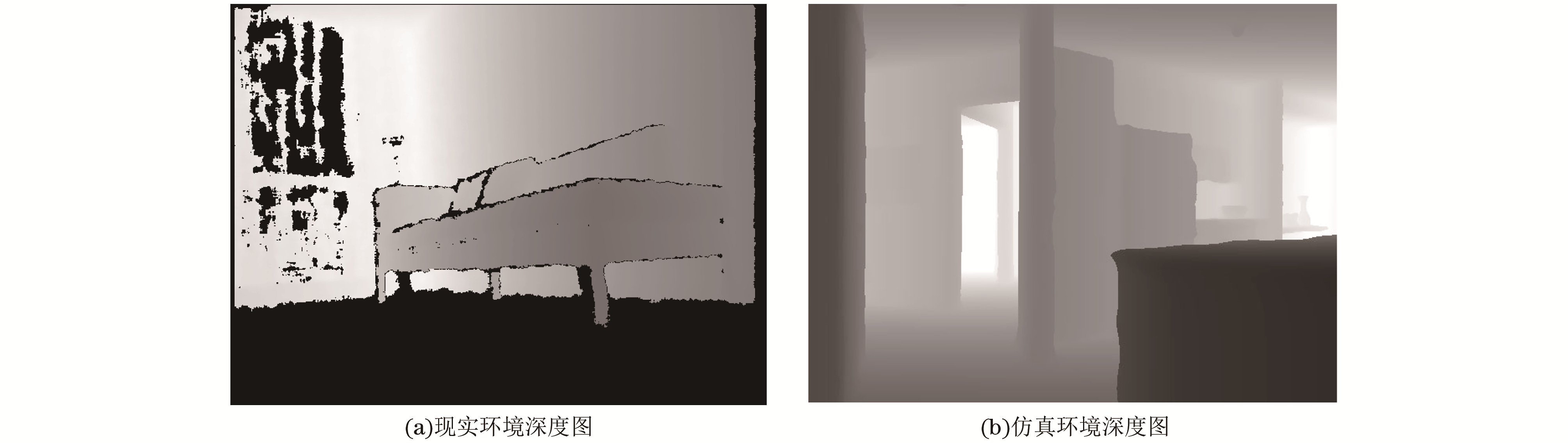
图14
深度图像的对比
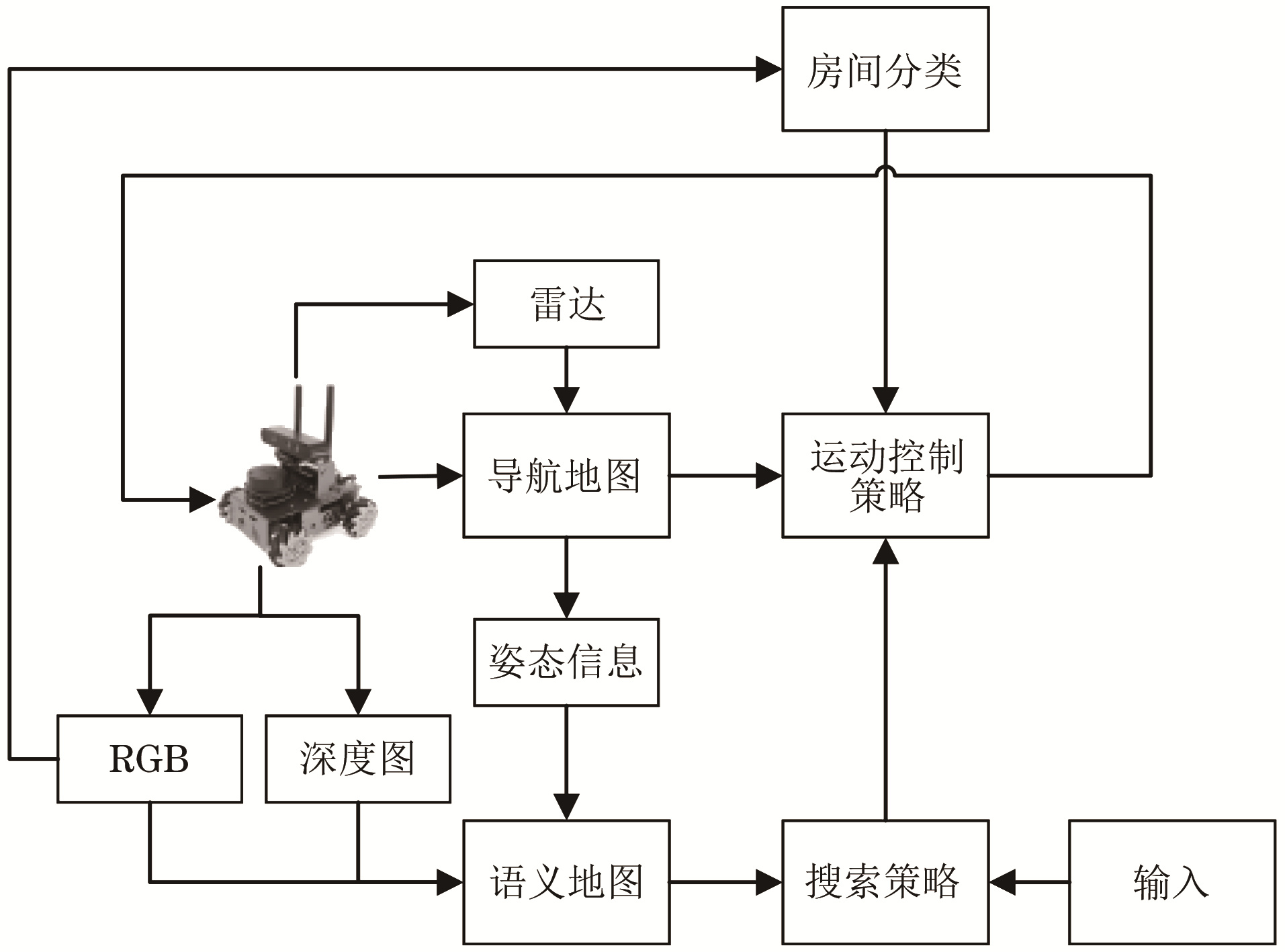
图15
实际部署的导航算法流程
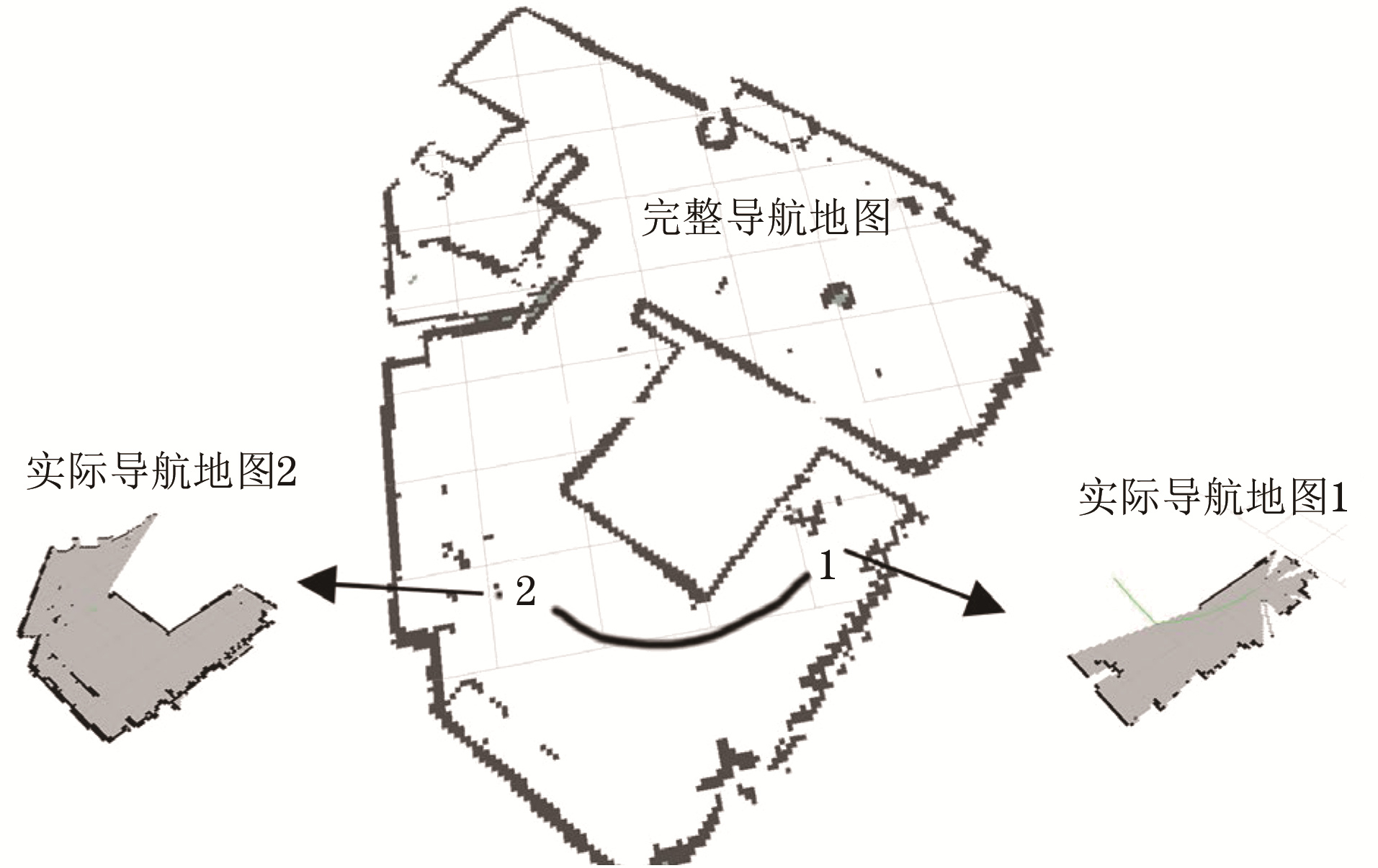
图16
在线导航地图创建示意图
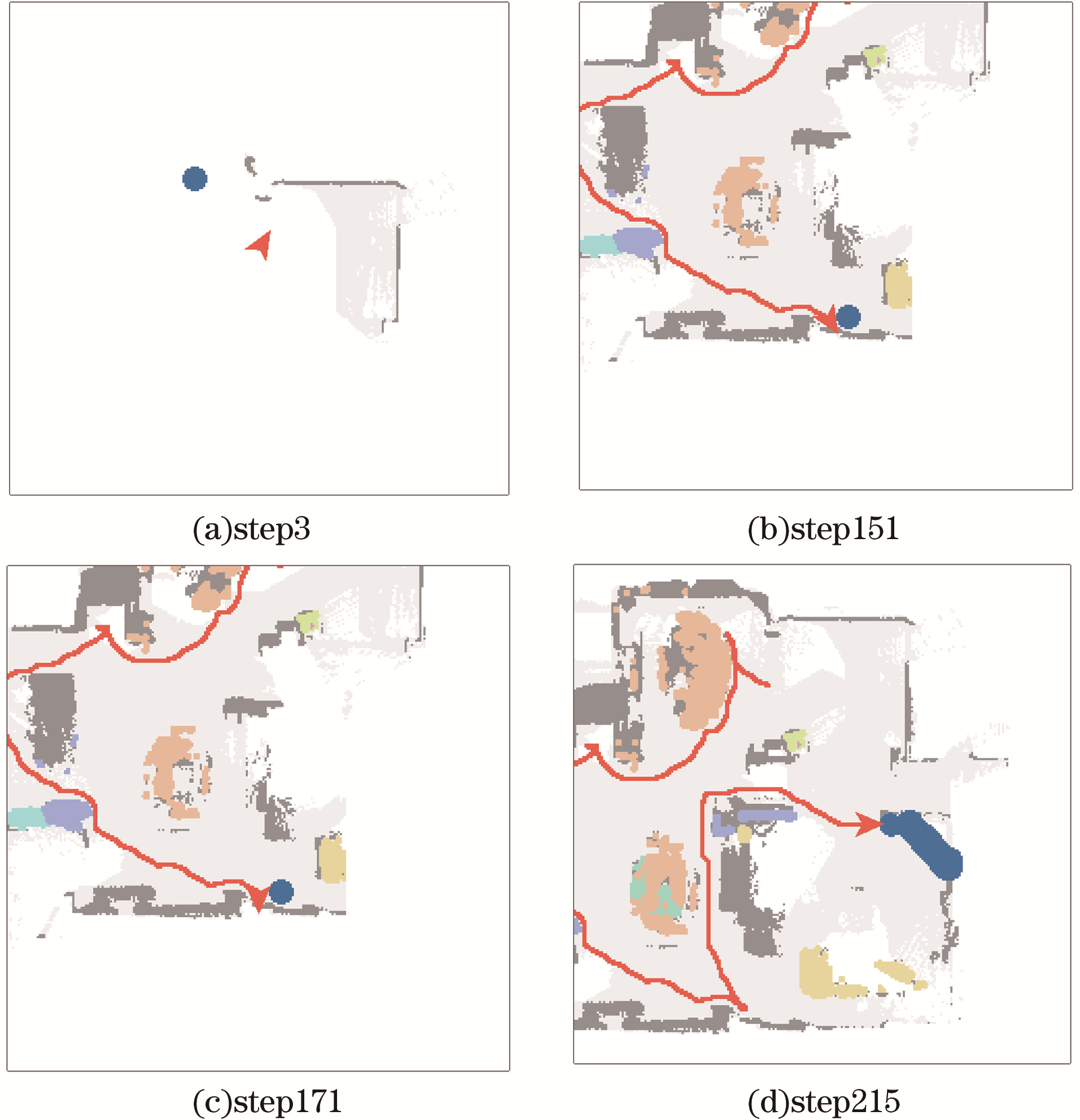
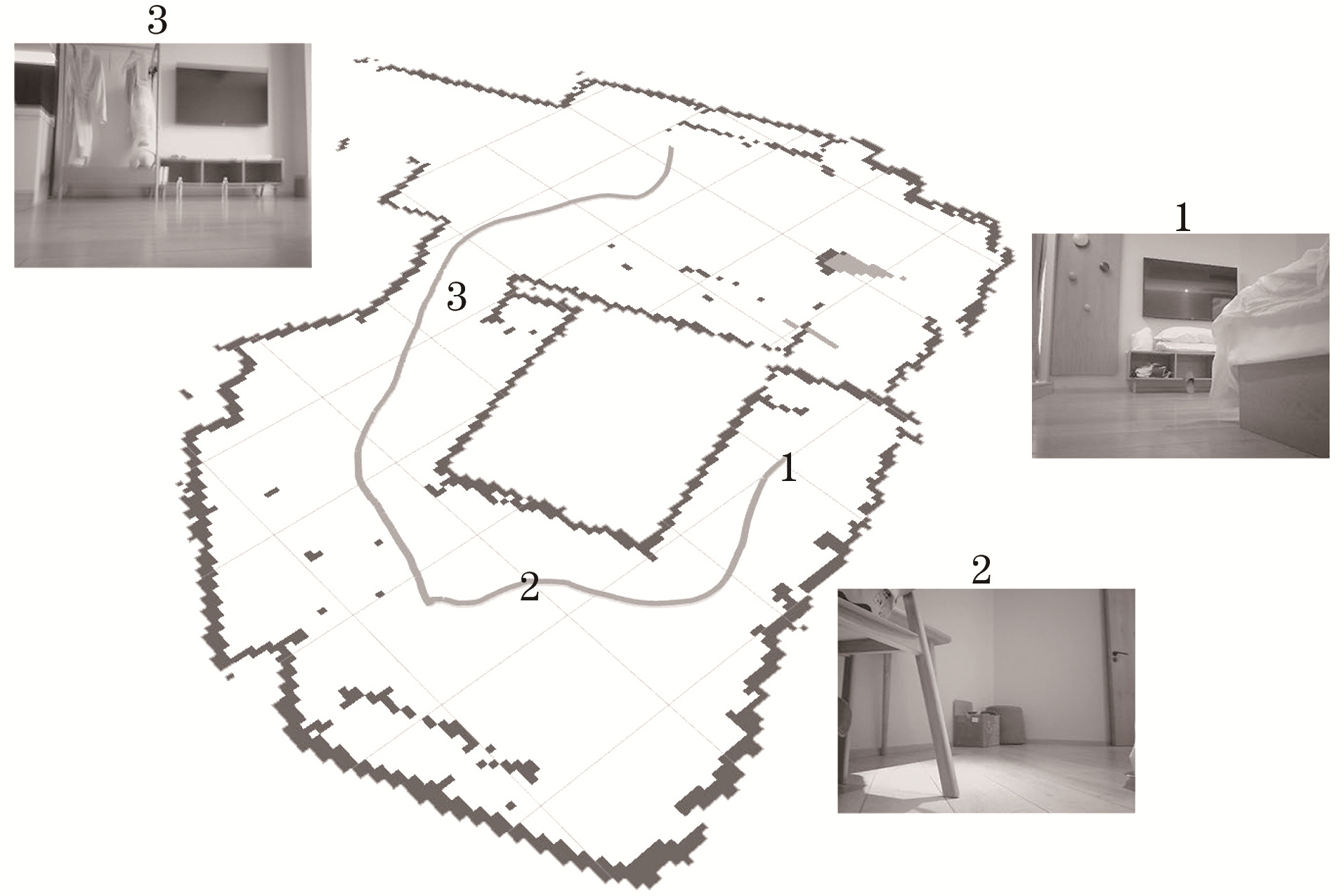
图17
一次导航的完整路径
图18
导航失败案例分析